

Introducing Matic
The world’s most advanced floor cleaner. Your home’s best helper.
Pre-Order Your Matic

Watch Matic take on NYC

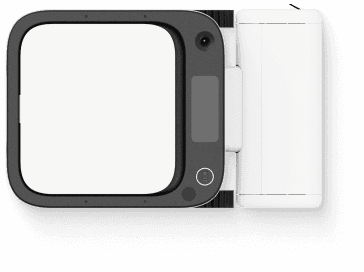
Meet the first truly smart home robot.
Matic senses and solves dry and wet messes — no babysitting required.

01
Mopping and vacuuming — Matic does it all.
Matic’s state-of-the-art computer vision senses what’s around it, automatically switching between cleaning modes to get the job done.



Cutting-edge mess and surface detection

Works on all floor surfaces

Auto-toggles between mopping and vacuuming
02
Learns nonstop. Cleans nonstop. No supervision necessary.
Matic’s on patrol 24/7, quietly working around the clock for a continuous clean. Watch Matic because you want to, not because you have to.


Patrols your home with 3D floor mapping

Knows what to clean (and what to avoid)

Quiet enough for work time and nap time
03
“Hey Matic, clean this!”
Matic responds to your voice and gestures. Create a routine in the app or just point and tell Matic where to go. Your house, your rules.

Listens to your voice and recognizes gestures

Easy in-app scheduling

9:30 AM, living room, Vacuum
Dog back from walk.

3:00 PM, Kitchen, Mop
After school snack.
9:38 PM, Dining Room. Both
Post dinner clean.

10:27 PM, Living Room, Vacuum
Movie night.




Less time cleaning, more time
Matic saves the average family an hour a day on floor cleaning.

The future of robotics comes home.
Matic was founded by two busy fathers who love technology and hate cleaning. With decades of engineering experience, they’re on a mission to solve everyday problems with remarkable robotics.
Interested in Matic? Work with us




Finally, a floor-cleaning innovation worth celebrating.


 Vacuuming
Vacuuming© 2024 Matic. All Rights Reserved.